




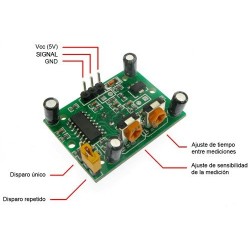
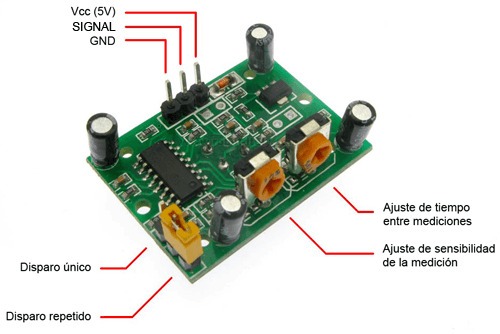
Tensão de Alimentação 5v, saida:0,3V ou 5V (saida 5V quando detectado movimento),angulo de detecção 110º, distancia maxima 7m
DESCRIÇÃO EM PORTUGUÊS BREVEMENTE DISPONÍVEL
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
Highly integrated module popularly used for entry detection, it complies with microcontroller or DC loads.
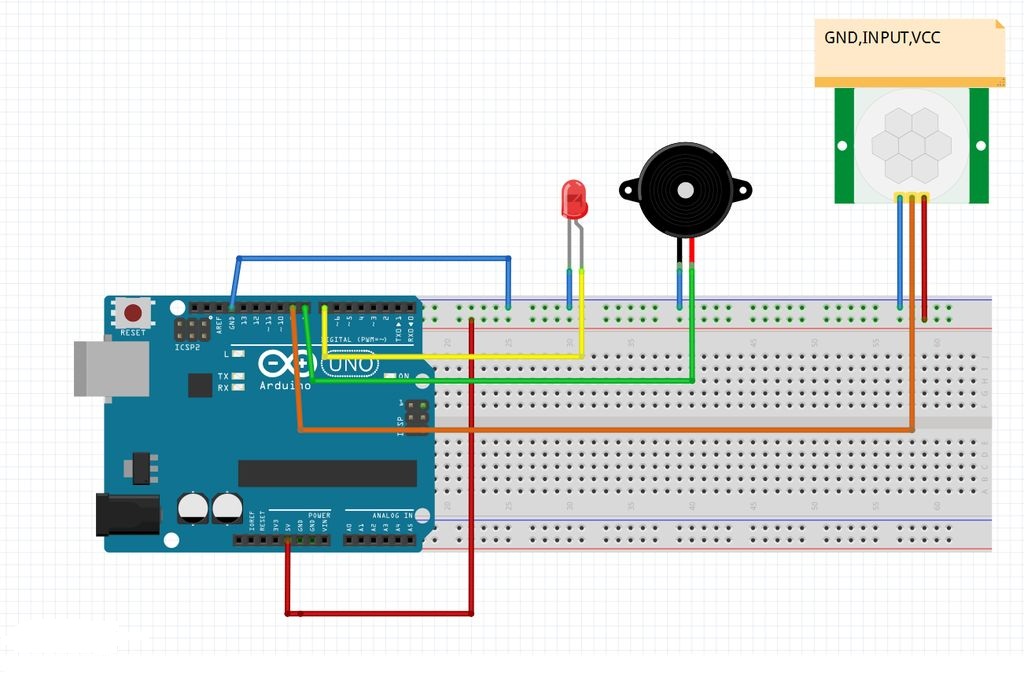
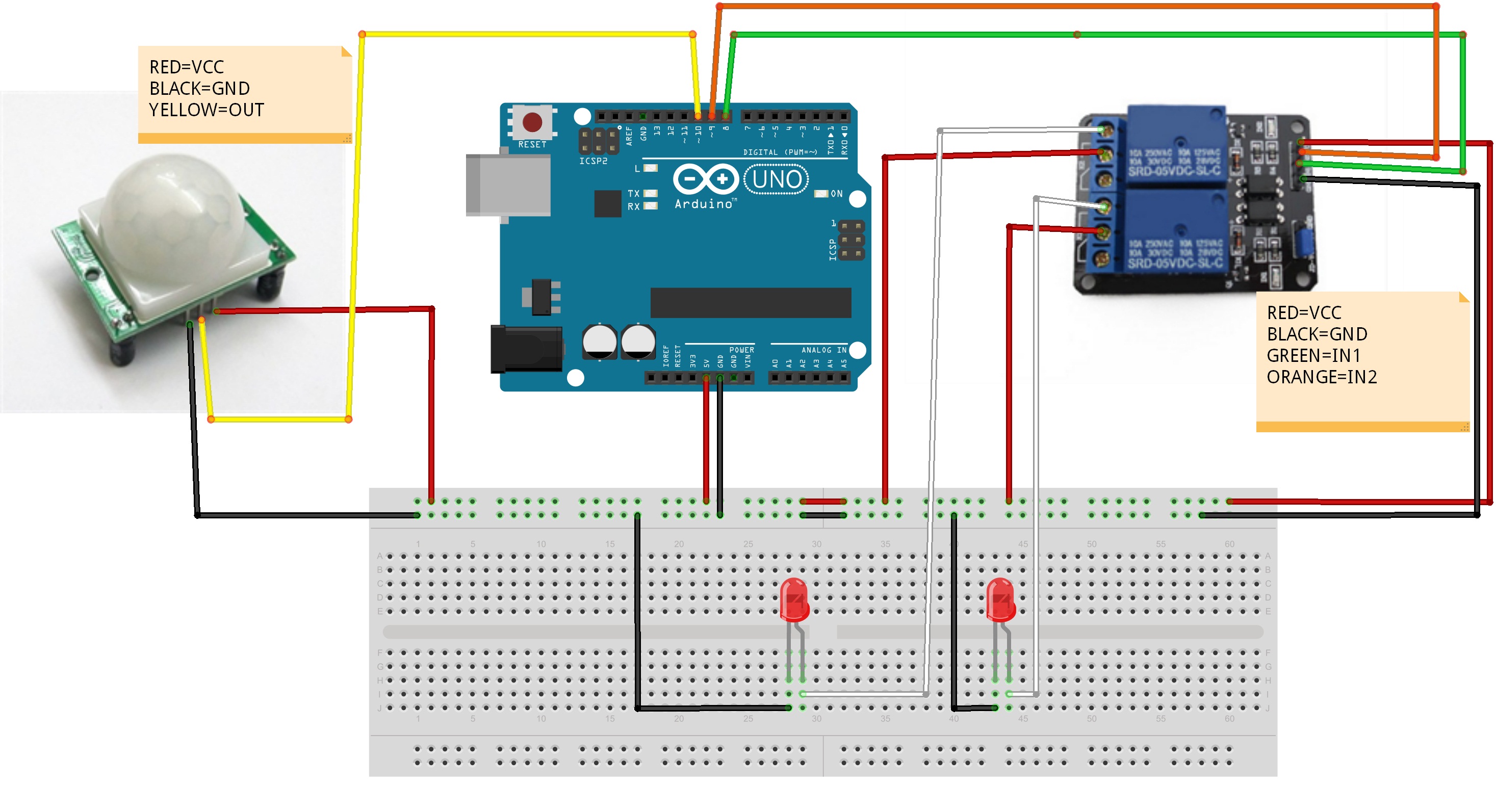
// (HC-SR501) PIR Sensor
int PIRpin = 8; // PIR connected pin
int value;
void setup() {
Serial.begin(9600);
pinMode(2, OUTPUT); //For Led
}
void loop() {
value = digitalRead(PIRpin); //Read PIR state
if (value == LOW) {
Serial.println("No Movement");
digitalWrite (2, LOW);
}
else {
Serial.println("Movement!");
digitalWrite (2, HIGH);
}
delay(100); //Wait
}


Tensão de Alimentação 5v, saida:0,3V ou 5V (saida 5V quando detectado movimento),angulo de detecção 110º, distancia maxima 7m