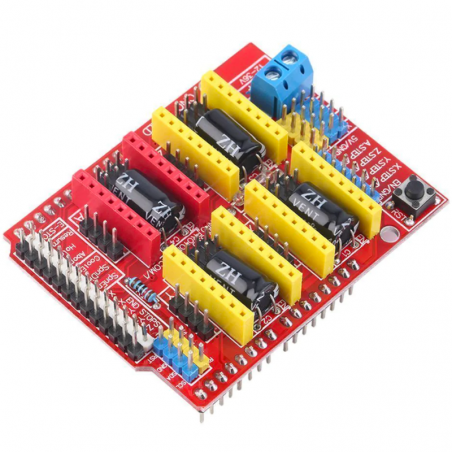

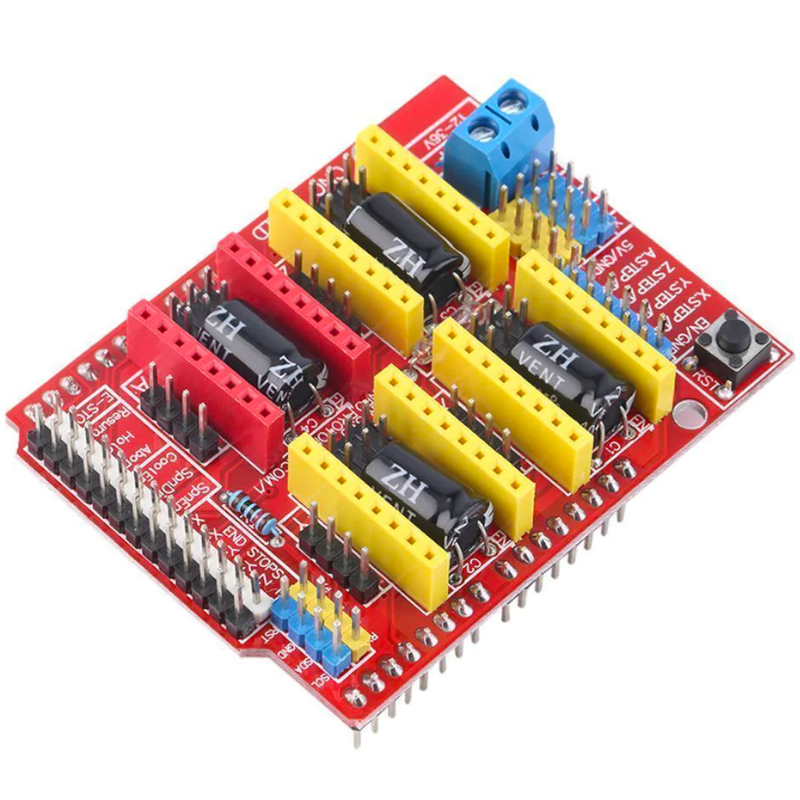
O CNC Shield Arduino V3 foi desenvolvido especialmente para ser utilizado em Máquinas de Gravação (CNC) e Impressoras 3D.
Este Shield possibilita a conexão de até 4 Drivers A4988 / DVR8825 (vendidos separadamente), permitindo o controle de até 4 Motores de Passo.
Possui bornes para alimentação externa dos motores, podendo receber tensões entre 12V a 36VDC e ainda um botão reset integrado à sua placa Arduino.
DESCRIÇÃO EM PORTUGUÊS BREVEMENTE DISPONÍVEL
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
Arduino pins:
8 ------------------------ EN ( stepper motor driver enable , active low )
7 ----------------------- Z.DIR (Z -axis direction control )
6 ----------------------- Y.DIR (Y -axis direction control )
5 ----------------------- X.DIR (X -axis direction control )
4 ---------------------- Z.STEP (Z -axis stepper control )
3 ---------------------- Y.STEP (Y -axis stepper control )
2 ---------------------- X.STEP (X -axis stepper control )
/ / The following is a simple stepper motor control procedures,
# define EN 8 / / stepper motor enable , active low
# define X_DIR 5 / / X -axis stepper motor direction control
# define Y_DIR 6 / / y -axis stepper motor direction control
# define Z_DIR 7 / / z axis stepper motor direction control
# define X_STP 2 / / x -axis stepper control
# define Y_STP 3 / / y -axis stepper control
# define Z_STP 4 / / z -axis stepper control
/ *
/ / Function : step . function: to control the direction of the stepper motor , the number of steps .
/ / Parameters : dir direction control , dirPin corresponding stepper motor DIR pin , stepperPin corresponding stepper motor " step " pin , Step number of step of no return value.
* /
void step (boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite (dirPin, dir);
delay (50);
for (int i = 0; i <steps; i + +) {
digitalWrite (stepperPin, HIGH);
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {/ / The stepper motor used in the IO pin is set to output
pinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
pinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, LOW);
}
void loop () {
step (false, X_DIR, X_STP, 200); / / X axis motor reverse 1 ring, the 200 step is a circle.
step (false, Y_DIR, Y_STP, 200); / / y axis motor reverse 1 ring, the 200 step is a circle.
step (false, Z_DIR, Z_STP, 200); / / z axis motor reverse 1 ring, the 200 step is a circle.
delay (1000);
step (true, X_DIR, X_STP, 200); / / X axis motor forward 1 laps, the 200 step is a circle.
step (true, Y_DIR, Y_STP, 200); / / y axis motor forward 1 laps, the 200 step is a circle.
step (true, Z_DIR, Z_STP, 200); / / z axis motor forward 1 laps, the 200 step is a circle.
delay (1000);
}
Note: When inserting the A4988 module, must be careful not to insert opposite.
Stepper motor wiring as follows:
2A, 2B is a group (red, green), 1A, 1B is other group (blue, yellow), if want to change direction, can be change the position of one group , for example 2A, 2B mutually exchanged.

Produtos Associados




O CNC Shield Arduino V3 foi desenvolvido especialmente para ser utilizado em Máquinas de Gravação (CNC) e Impressoras 3D.
Este Shield possibilita a conexão de até 4 Drivers A4988 / DVR8825 (vendidos separadamente), permitindo o controle de até 4 Motores de Passo.
Possui bornes para alimentação externa dos motores, podendo receber tensões entre 12V a 36VDC e ainda um botão reset integrado à sua placa Arduino.