






Motor DC12V 146rpm de alta qualidade, silêncioso. Bastante utilizado na robótica móvel
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
Motor DC personalizado de alta qualidade. Este motor destaca-se por ser silencioso e possuir um alto binário com um encoder óptico buildin. O encoder ótico fornece 663 plusos por rotação, reprensentando uma descretização de 0,54 graus de rotação do eixo. A resolução pode atender aos requisitos gerais de um PID para controlo de velocidade.
Este motor é amplamente utilizado na área robôs móveis
Especificação
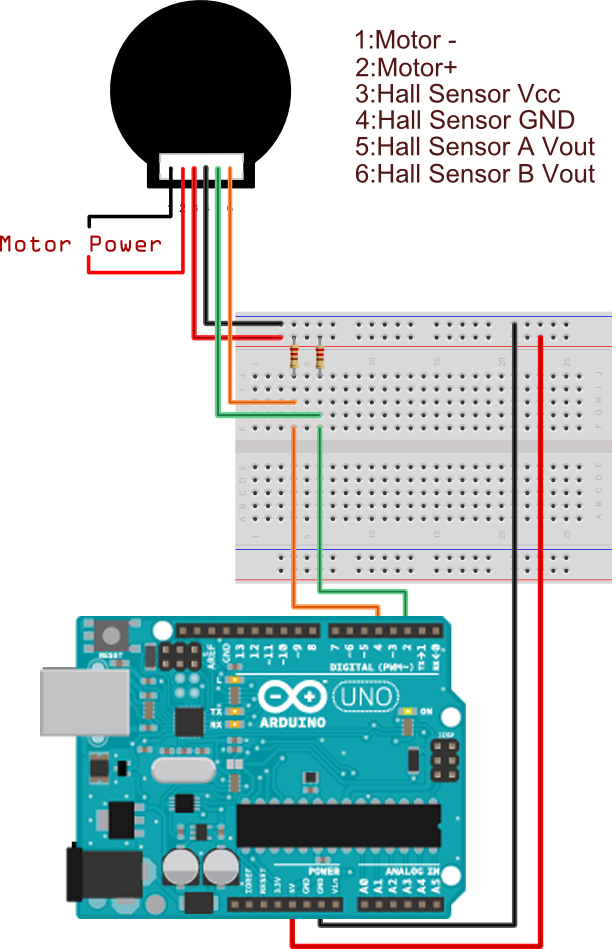
Interface do Encoder

Nota: É necessária uma resistência de pull-up entre VCC e sinal quando se utiliza os encoders
Arduino Example code:
//The sample code for driving one way motor encoder const byte encoder0pinA = 2;//A pin -> the interrupt pin 2 const byte encoder0pinB = 4;//B pin -> the digital pin 4 byte encoder0PinALast; int duration;//the number of the pulses boolean Direction;//the rotation direction void setup() { Serial.begin(57600);//Initialize the serial port EncoderInit();//Initialize the module } void loop() { Serial.print("Pulse:"); Serial.println(duration); duration = 0; delay(100); } void EncoderInit() { Direction = true;//default -> Forward pinMode(encoder0pinB,INPUT); attachInterrupt(0, wheelSpeed, CHANGE);//int.0 } void wheelSpeed() { int Lstate = digitalRead(encoder0pinA); if((encoder0PinALast == LOW) && Lstate==HIGH) { int val = digitalRead(encoder0pinB); if(val == LOW && Direction) { Direction = false; //Reverse } else if(val == HIGH && !Direction) { Direction = true; //Forward } } encoder0PinALast = Lstate; if(!Direction) duration++; else duration--; }
Conteúdo do Produto
Documentos
Desenhos mecânicos

Produtos Associados



Motor DC12V 146rpm de alta qualidade, silêncioso. Bastante utilizado na robótica móvel
