")

")
")
")
")
Este é um controlador de motor DC Dual-H-Bridge de tamanho ultra compacto (com base em HR8833), que pode controlar motores DC em ambos os sentidos, com uma corrente de 1.5 A e até 10V.
DESCRIÇÃO EM PORTUGUÊS BREVEMENTE DISPONÍVEL
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
This is a ultra compact size Dual-H-Bridge dc motor driver (Based on HR8833), which could drive two way 1.5A DC brush motors up to 10V . It has the same footprint as your thumbnail suitable for projects with limited spaces.

Both sides of the module are desgined with standard XH2.54 pins, which allows you to plug it on a breadboard or prototype board.
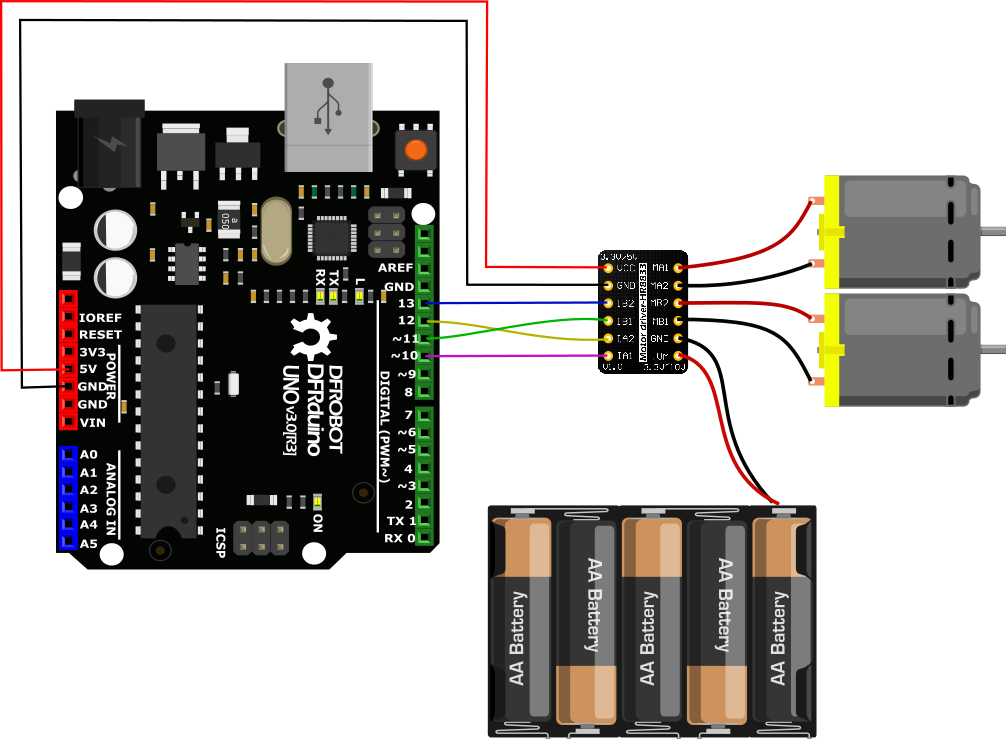
/* * @file Motor driver HR8833-Test.ino * @brief HR8833-Test.ino Motor control program * * control motor positive inversion * * @author lei.wu@dfrobot.com * @version V1.0 * @date 2016-4-13 */ const int IA1 = 10; const int IA2 = 12; const int IB1 = 11; const int IB2 = 13; void setup() { pinMode(IA1, OUTPUT); pinMode(IA2, OUTPUT); pinMode(IB1, OUTPUT); pinMode(IB2, OUTPUT); } void loop() { MA1_Forward(200); //Motor MA1 forward; PWM speed control delay(1000); MA2_Backward(200); //Motor MA1 backward; PWM speed control delay(1000); } void MA1_Forward(int Speed1) //fast decay; Speed = High duty-cycle { analogWrite(IA1, Speed1); digitalWrite(IA2, LOW); } void MA2_Backward(int Speed1) //slow decay; Speed = Low duty-cycle { int Speed2 = 255 - Speed1; analogWrite(IA1, Speed2); digitalWrite(IA2, HIGH); } void MB1_Forward(int Speed1) { analogWrite(IB1, Speed1); digitalWrite(IB2, LOW); } void MB2_Backward(int Speed1) { int Speed2 = 255 - Speed1; analogWrite(IB1, Speed2); digitalWrite(IB2, HIGH); }

Produtos Associados


")
Este é um controlador de motor DC Dual-H-Bridge de tamanho ultra compacto (com base em HR8833), que pode controlar motores DC em ambos os sentidos, com uma corrente de 1.5 A e até 10V.
