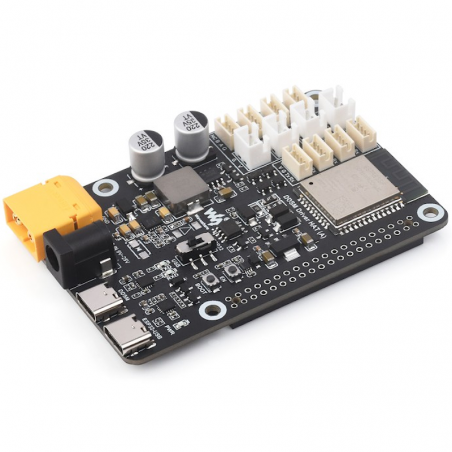




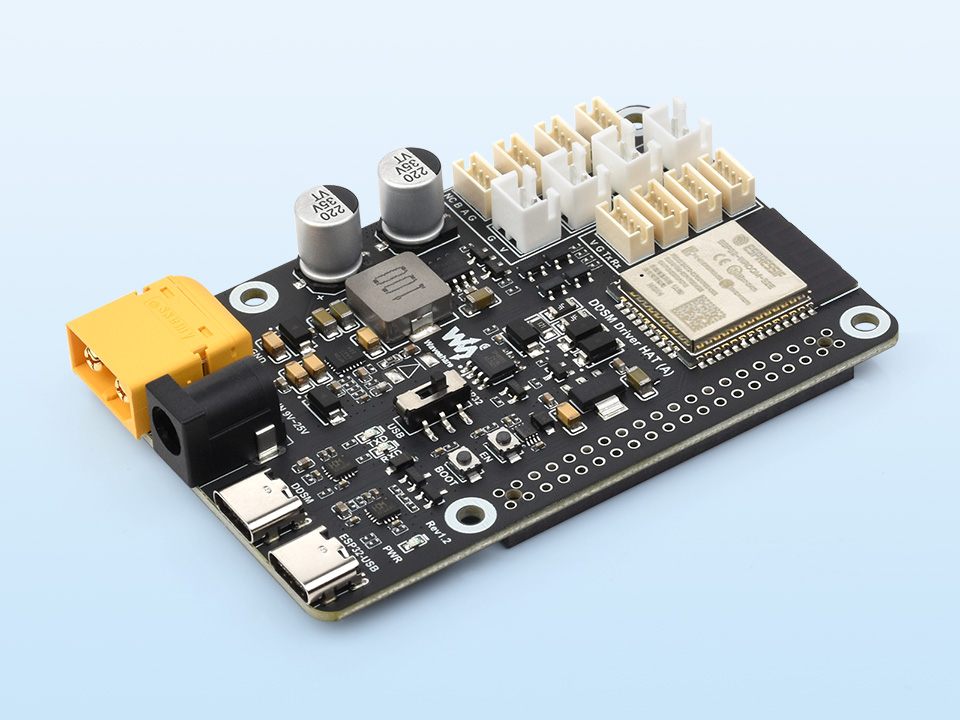
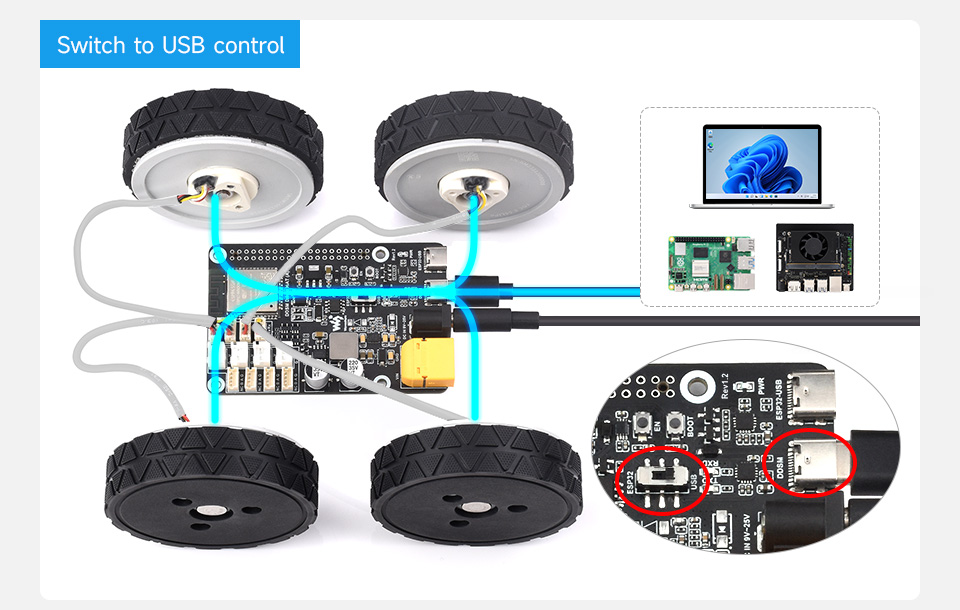
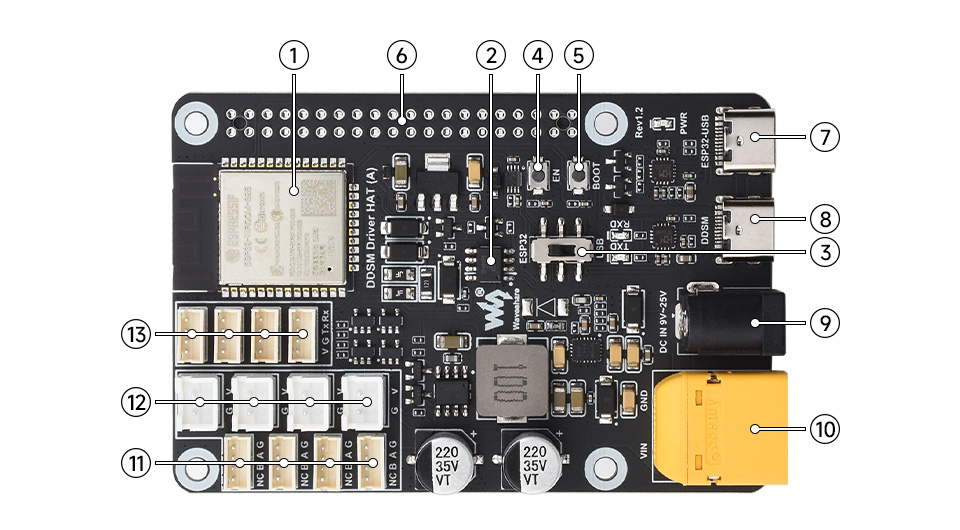
Esta é uma placa de driver para servo motores de acionamento direto da série DDSM, com 4 interfaces de motor DDSM115 e 4 interfaces DDSM210, integradas com um circuito de controlo de motor de ESP32. Abrimos o código-fonte das demonstrações de controlo do motor do hub e da interface de comunicação JSON. Os utilizadores podem ligar-se via USB e utilizar um computador host para enviar comandos no formato JSON para controlar os motores e receber feedback no formato JSON (como a corrente do motor, velocidade, temperatura, etc.).
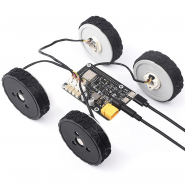
Os utilizadores podem também realizar desenvolvimento secundário, utilizando-o como controlador slave em projetos robóticos.
DESCRIÇÃO EM PORTUGUÊS BREVEMENTE DISPONÍVEL
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
| Controller Module | ESP32 |
|---|---|
| Power supply port | XT60, DC5525 |
| Power supply | DDSM115: 12-24V DC DDSM210: 11~22V DC |
| Hub motor port | DDSM115, DDSM210 |
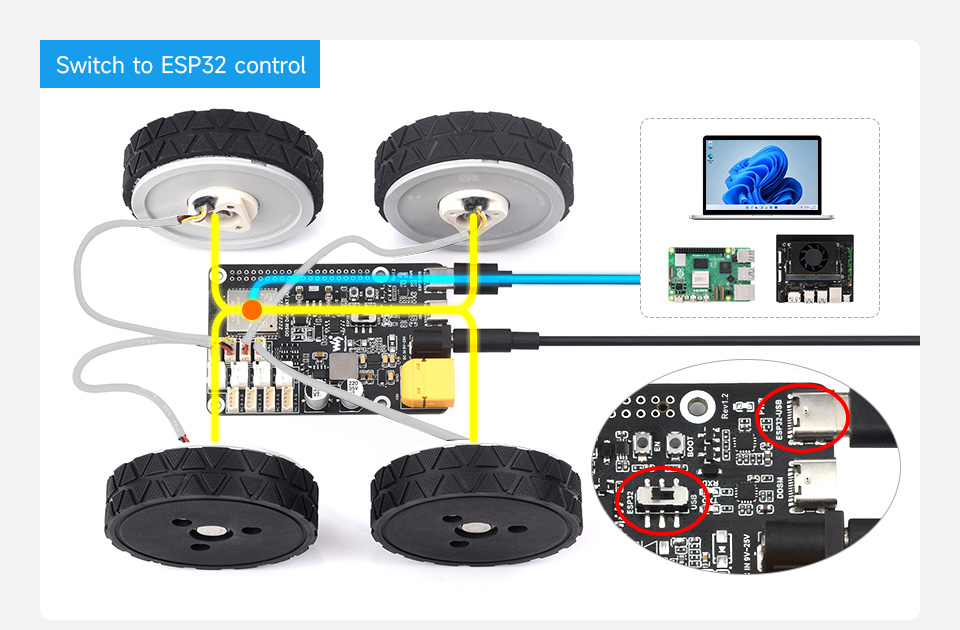
| communication INTERFACE | Type-C × 2, UART |
| Wireless communication | 2.4G WiFi |
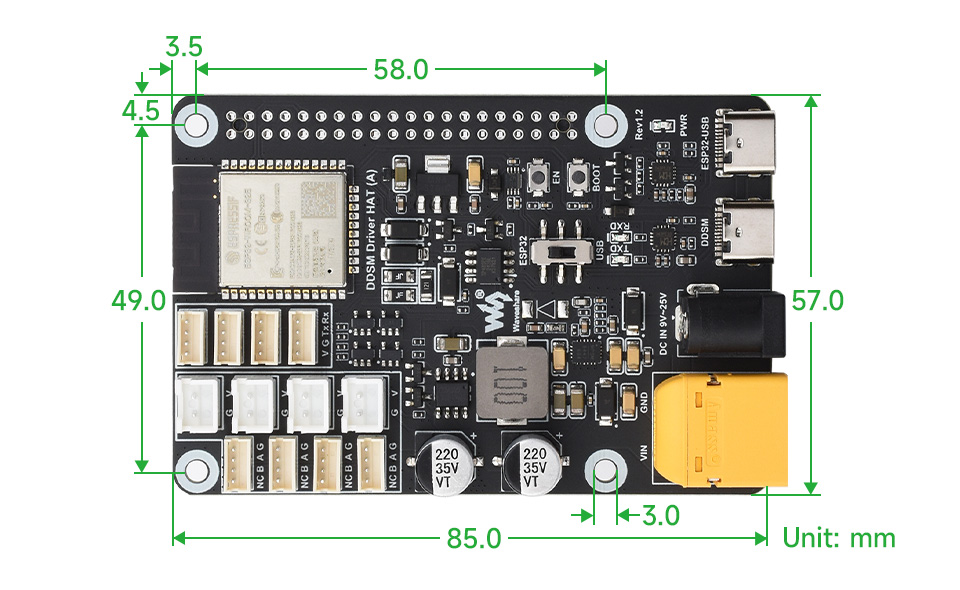
| Mounting hole DIAMETER | 3 mm |
| Mounting hole spacing | 58×49 mm |
| PCB size | 85×57 mm |

Wireless control Mode via Web application

Supports Powering The Pi And Communicating Through GPIO UART Interface, Neat Cable Management


Produtos Associados





Esta é uma placa de driver para servo motores de acionamento direto da série DDSM, com 4 interfaces de motor DDSM115 e 4 interfaces DDSM210, integradas com um circuito de controlo de motor de ESP32. Abrimos o código-fonte das demonstrações de controlo do motor do hub e da interface de comunicação JSON. Os utilizadores podem ligar-se via USB e utilizar um computador host para enviar comandos no formato JSON para controlar os motores e receber feedback no formato JSON (como a corrente do motor, velocidade, temperatura, etc.).
Os utilizadores podem também realizar desenvolvimento secundário, utilizando-o como controlador slave em projetos robóticos.



