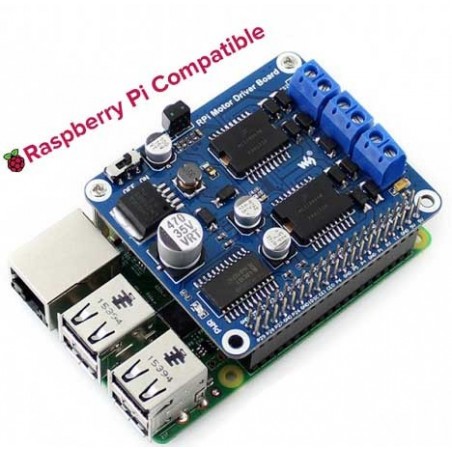


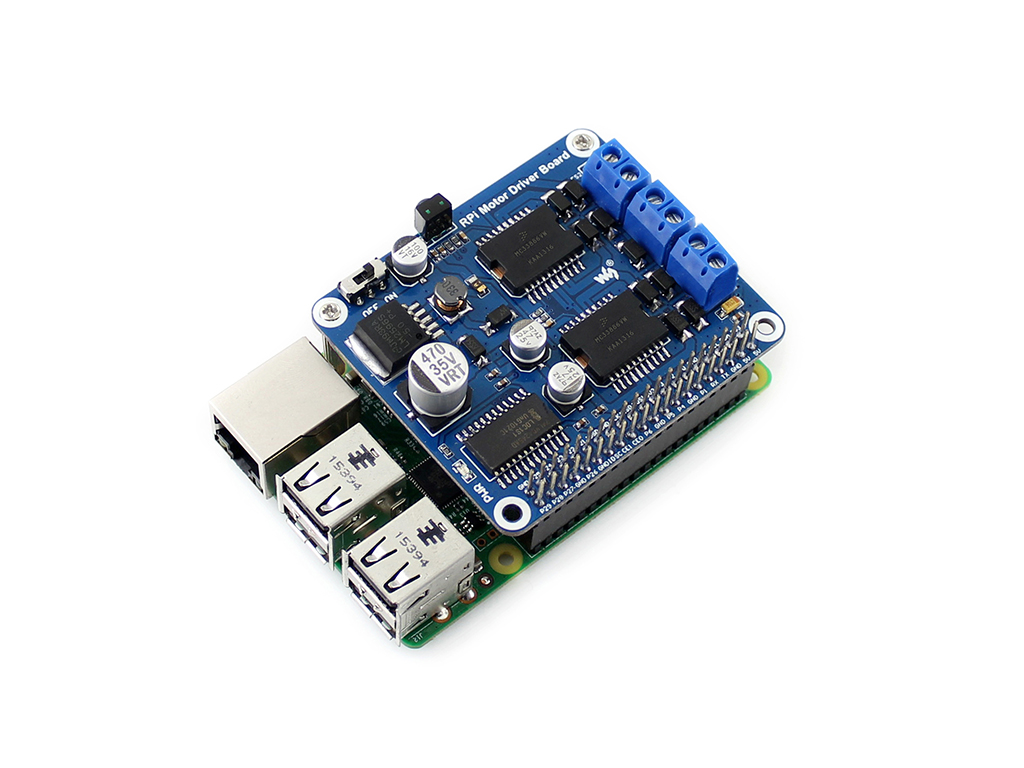
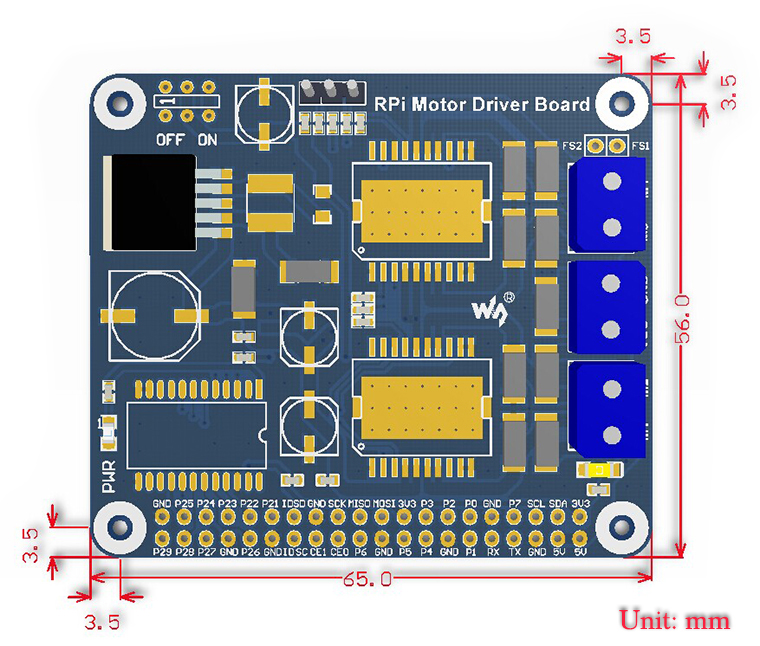
A placa controladora de motores dá à sua Pi a capacidade de acionar dois motores DC ou um motor de passo. É uma escolha ideal para um robô móvel DIY com base na Raspberry Pi.
DESCRIÇÃO EM PORTUGUÊS BREVEMENTE DISPONÍVEL
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
Note: photos are FOR REFERENCE ONLY, the other boards/modules/accessories are NOT included in the price.
| Interface | wiringPi | BCM |
|---|---|---|
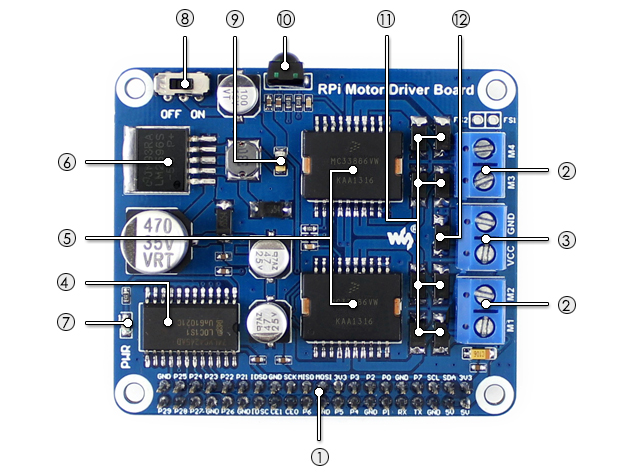
| M1 | P28 | 20 |
| M2 | P29 | 21 |
| PWMA | P25 | 26 |
| M3 | P22 | 6 |
| M4 | P23 | 13 |
| PWMB | P26 | 12 |
M1 and M2 are connected to the right motor, while M3 and M4 are connected to the left motor. PWMA and PWMB are output enable pins, active high enable. When they are driven to High level, the PWM pulse will be outputted from M1, M2, M3 and M4, so as to control the speed of the robot.
| M1 | M2 | M3 | M4 | Descriptions |
|---|---|---|---|---|
| 1 | 0 | 1 | 0 | When the motors rotate forwards, the robot goes straight |
| 0 | 1 | 0 | 1 | When the motors rotate backwards, the robot draws back |
| 0 | 0 | 1 | 0 | When the right motor stops and left motor rotates forwards, the robot turns right |
| 1 | 0 | 0 | 0 | When the left motor stops and right motor rotates forwards, the robot turns left |
| 0 | 0 | 0 | 0 | When the motors stop, the robot stops |

Produtos Associados




A placa controladora de motores dá à sua Pi a capacidade de acionar dois motores DC ou um motor de passo. É uma escolha ideal para um robô móvel DIY com base na Raspberry Pi.