





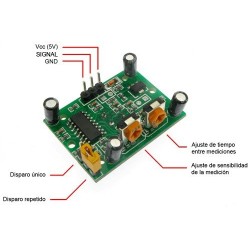
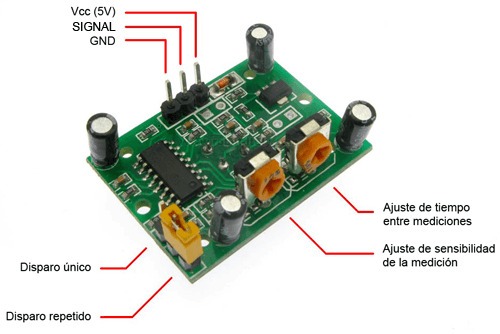
Highly integrated module popularly used for entry detection, it complies with microcontroller or DC loads.
If you have any questions on this product please feel free to contact us.
*Disclaimer: The images are merely illustrative.
Highly integrated module popularly used for entry detection, it complies with microcontroller or DC loads.
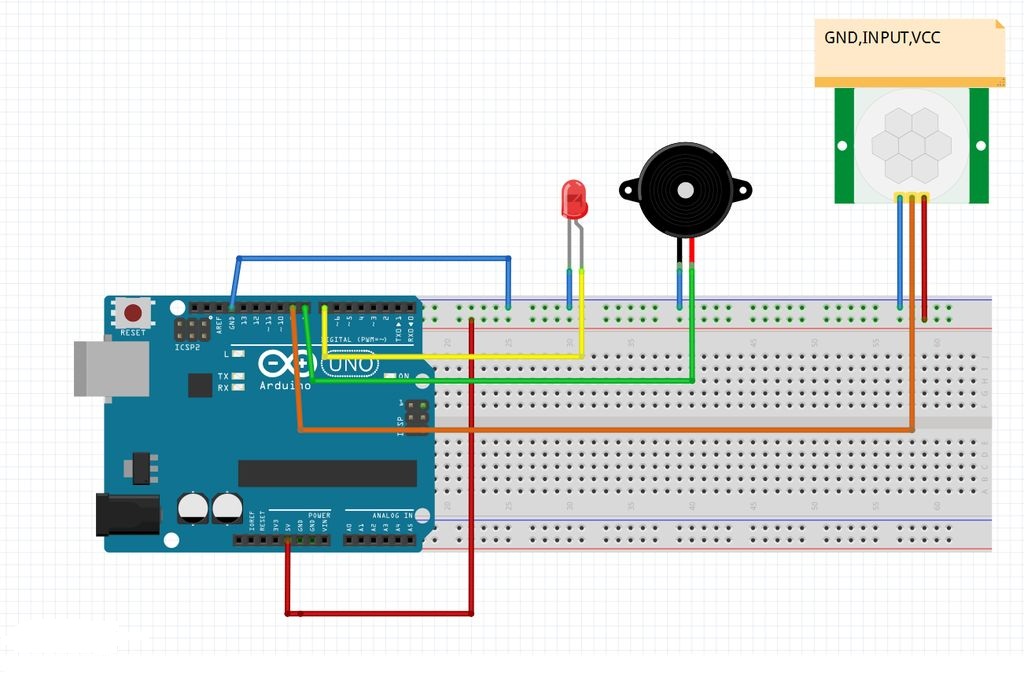
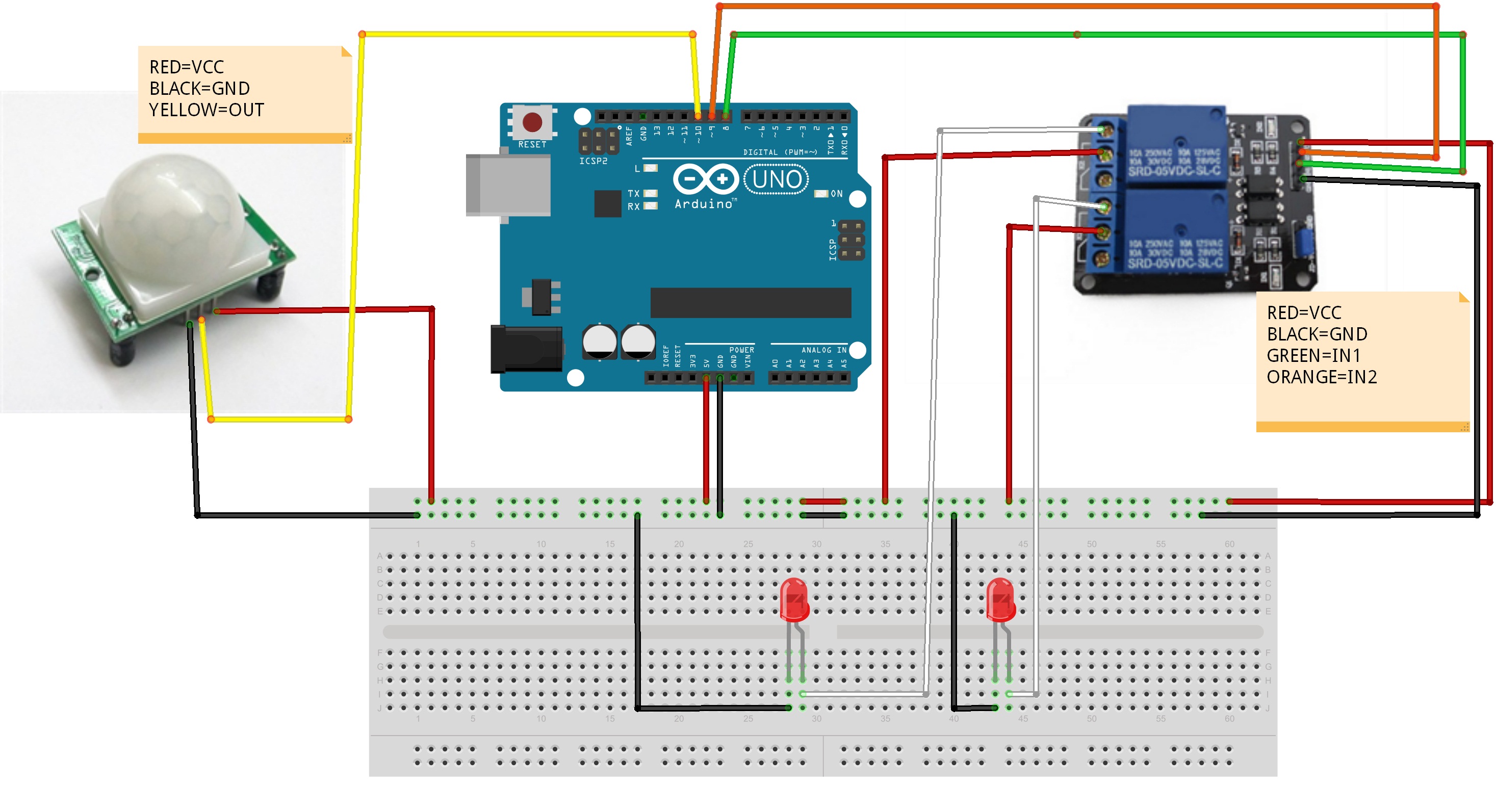
// (HC-SR501) PIR Sensor
int PIRpin = 8; // PIR connected pin
int value;
void setup() {
Serial.begin(9600);
pinMode(2, OUTPUT); //For Led
}
void loop() {
value = digitalRead(PIRpin); //Read PIR state
if (value == LOW) {
Serial.println("No Movement");
digitalWrite (2, LOW);
}
else {
Serial.println("Movement!");
digitalWrite (2, HIGH);
}
delay(100); //Wait
}


Highly integrated module popularly used for entry detection, it complies with microcontroller or DC loads.