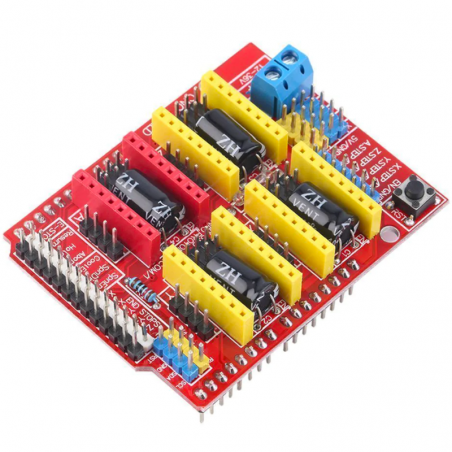

The CNC Shield Arduino V3 was specially developed to be used in Engraving Machines (CNC) and 3D Printers. This Shield allows the connection of up to 4 A4988 / DVR8825 Drivers (sold operated), allowing the control of up to 4 Stepper Motors. It has support for external motor power, and can have a power between 36VDC and even a reset button integrated into your Arduino board.
If you have any questions on this product please feel free to contact us.
*Disclaimer: The images are merely illustrative.
Arduino pins:
8 ------------------------ EN ( stepper motor driver enable , active low )
7 ----------------------- Z.DIR (Z -axis direction control )
6 ----------------------- Y.DIR (Y -axis direction control )
5 ----------------------- X.DIR (X -axis direction control )
4 ---------------------- Z.STEP (Z -axis stepper control )
3 ---------------------- Y.STEP (Y -axis stepper control )
2 ---------------------- X.STEP (X -axis stepper control )
/ / The following is a simple stepper motor control procedures,
# define EN 8 / / stepper motor enable , active low
# define X_DIR 5 / / X -axis stepper motor direction control
# define Y_DIR 6 / / y -axis stepper motor direction control
# define Z_DIR 7 / / z axis stepper motor direction control
# define X_STP 2 / / x -axis stepper control
# define Y_STP 3 / / y -axis stepper control
# define Z_STP 4 / / z -axis stepper control
/ *
/ / Function : step . function: to control the direction of the stepper motor , the number of steps .
/ / Parameters : dir direction control , dirPin corresponding stepper motor DIR pin , stepperPin corresponding stepper motor " step " pin , Step number of step of no return value.
* /
void step (boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite (dirPin, dir);
delay (50);
for (int i = 0; i <steps; i + +) {
digitalWrite (stepperPin, HIGH);
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {/ / The stepper motor used in the IO pin is set to output
pinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
pinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, LOW);
}
void loop () {
step (false, X_DIR, X_STP, 200); / / X axis motor reverse 1 ring, the 200 step is a circle.
step (false, Y_DIR, Y_STP, 200); / / y axis motor reverse 1 ring, the 200 step is a circle.
step (false, Z_DIR, Z_STP, 200); / / z axis motor reverse 1 ring, the 200 step is a circle.
delay (1000);
step (true, X_DIR, X_STP, 200); / / X axis motor forward 1 laps, the 200 step is a circle.
step (true, Y_DIR, Y_STP, 200); / / y axis motor forward 1 laps, the 200 step is a circle.
step (true, Z_DIR, Z_STP, 200); / / z axis motor forward 1 laps, the 200 step is a circle.
delay (1000);
}
Note: When inserting the A4988 module, must be careful not to insert opposite.
Stepper motor wiring as follows:
2A, 2B is a group (red, green), 1A, 1B is other group (blue, yellow), if want to change direction, can be change the position of one group , for example 2A, 2B mutually exchanged.

Related products




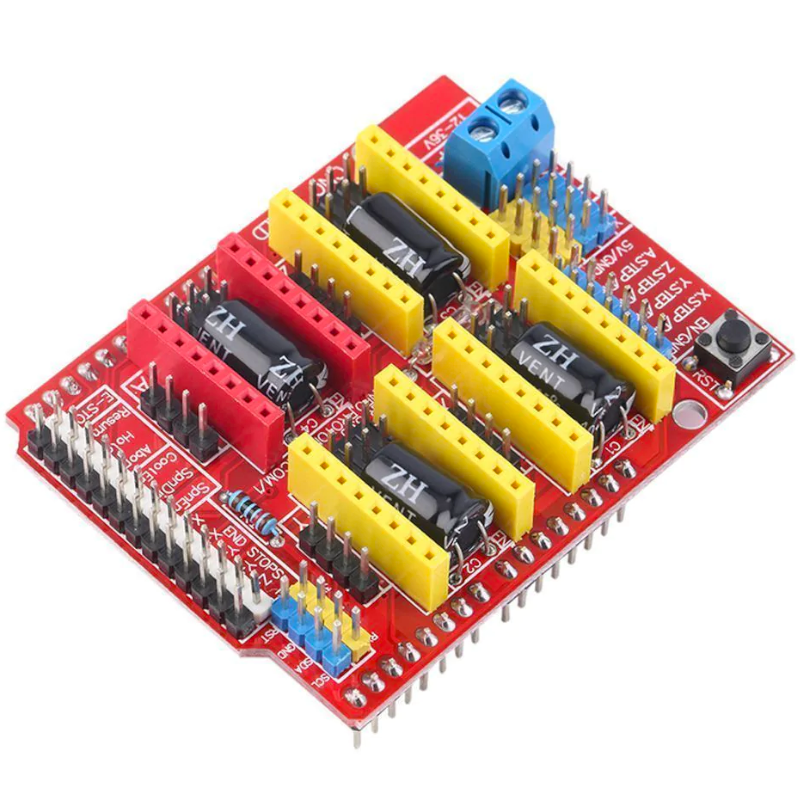
The CNC Shield Arduino V3 was specially developed to be used in Engraving Machines (CNC) and 3D Printers. This Shield allows the connection of up to 4 A4988 / DVR8825 Drivers (sold operated), allowing the control of up to 4 Stepper Motors. It has support for external motor power, and can have a power between 36VDC and even a reset button integrated into your Arduino board.