






High quality DC motor. Working voltage:12V, 146 rpm, Gear ratio: 51:1. This motor is widely used in mobile robot area.
If you have any questions on this product please feel free to contact us.
*Disclaimer: The images are merely illustrative.

Arduino Example code:
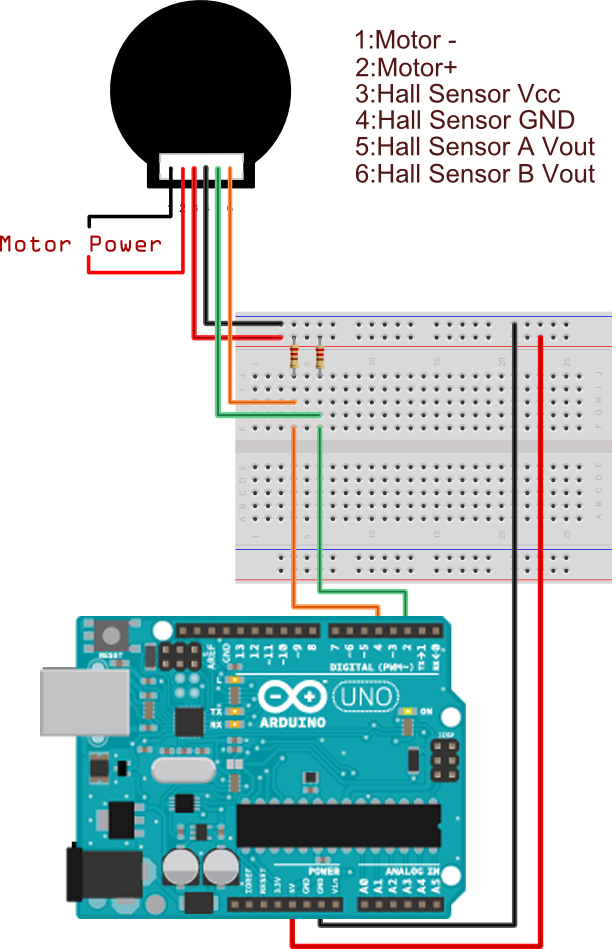
//The sample code for driving one way motor encoder const byte encoder0pinA = 2;//A pin -> the interrupt pin 2 const byte encoder0pinB = 4;//B pin -> the digital pin 4 byte encoder0PinALast; int duration;//the number of the pulses boolean Direction;//the rotation direction void setup() { Serial.begin(57600);//Initialize the serial port EncoderInit();//Initialize the module } void loop() { Serial.print("Pulse:"); Serial.println(duration); duration = 0; delay(100); } void EncoderInit() { Direction = true;//default -> Forward pinMode(encoder0pinB,INPUT); attachInterrupt(0, wheelSpeed, CHANGE);//int.0 } void wheelSpeed() { int Lstate = digitalRead(encoder0pinA); if((encoder0PinALast == LOW) && Lstate==HIGH) { int val = digitalRead(encoder0pinB); if(val == LOW && Direction) { Direction = false; //Reverse } else if(val == HIGH && !Direction) { Direction = true; //Forward } } encoder0PinALast = Lstate; if(!Direction) duration++; else duration--; }

Related products



High quality DC motor. Working voltage:12V, 146 rpm, Gear ratio: 51:1. This motor is widely used in mobile robot area.
