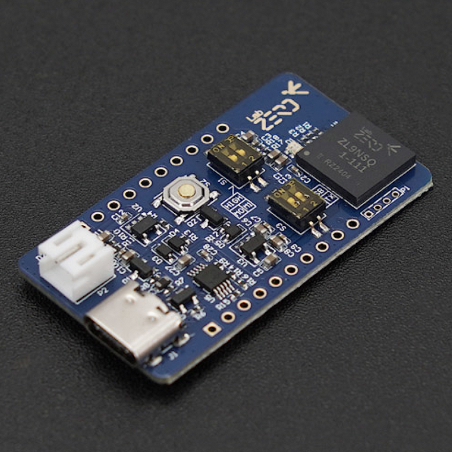




The ZL9NSQ is a high-performance 3D attitude sensor module that integrates a three-axis accelerometer, a three-axis gyroscope, and a three-axis magnetometer. Featuring a 32-bit ARM Cortex-M4F microprocessor, it utilizes the IMU Motion Engine algorithm along with a 2.4G wireless transceiver and packaged antenna. Advanced signal processing algorithms handle high-speed sampled sensor data to deliver accurate and reliable quaternions, Euler angles, calibrated accelerations, and calibrated angular velocities, providing precise three-dimensional attitude information.
If you have any questions on this product please feel free to contact us.
*Disclaimer: The images are merely illustrative.
The ZL9NSQ is a high-performance 3D attitude sensor module that integrates a three-axis accelerometer, a three-axis gyroscope, and a three-axis magnetometer. Featuring a 32-bit ARM Cortex-M4F microprocessor, it utilizes the IMU Motion Engine algorithm along with a 2.4G wireless transceiver and packaged antenna. Advanced signal processing algorithms handle high-speed sampled sensor data to deliver accurate and reliable quaternions, Euler angles, calibrated accelerations, and calibrated angular velocities, providing precise three-dimensional attitude information.
With a versatile working voltage range of 5V via USB Type-C or 3.3V/5V via P2-PH2.0/P4-VCC, and supporting multiple communication methods including RF, UART, and SPI, the ZL9NSQ ensures seamless integration into various systems. It achieves a static pitch/cross accuracy of 0.05° and offers a maximum data output rate of 250Hz, making it ideal for applications such as posture monitoring, gaming and entertainment equipment, personal health and fitness, and inertial navigation.

High-Performance, High-Precision IMU
The ZL9NSQ integrates a three-axis accelerometer, three-axis gyroscope, and three-axis magnetometer to provide comprehensive and precise three-dimensional attitude information.
Advanced Communication Methods
Supporting RF (Bluetooth), UART, and SPI communication methods, the ZL9NSQ allows for versatile data transmission and integration into various systems.

Figure: IMU Motion Engine Process Flowchart
Accurate Attitude Information
The sensor module delivers accurate quaternion, Euler angle, acceleration, and angular velocity data, essential for high-precision applications.
Integrated IMU Motion Engine Algorithm
The IMU Motion Engine software provides a complete set of composite data fusion algorithms, including attitude solution, interference judgment, and online calibration. This enables users to obtain 3D attitude information easily without the need for extensive programming.
High-performance, high-precision IMU
Integrated three-axis accelerometer, three-axis gyroscope, three-axis magnetometer
3 communication methods: RF, UART, SPI
Can provide quaternion, Euler angle, acceleration, angular velocity and other three-dimensional attitude information
Posture monitoring
Gaming and entertainment equipment
Personal health and fitness
Inertial navigation

Working voltage: J1-USB Type-C (5V), P2-PH2.0 (3.3V), P4-VCC (5V)
Communication method: RF (Bluetooth), UART, SPI
Pitch/cross accuracy (static): 0.05°
Pitch/cross accuracy (dynamic): 0.1°
Heading accuracy error (magnetometer assisted): 0.5°
Relative heading error (static): <1°/hr
Relative heading error (dynamic): 5°/hr
Angle resolution: <0.01°
Angle repeatability: <0.1°
Sensor raw data output rate: Max 250Hz
Navigation data output rate: Max 250Hz
Accelerometer Parameters
Range: ±16g
Zero bias stability: 2mg
Initial zero value: 40mg
Scale factor error: ±0.06%
Nonlinearity: ±0.1%
Axis alignment error: ±0.05°
Noise density: 75ug/√Hz
Bandwidth: 260Hz
Gyroscope Parameters
Range: ±2000°/s
Bias stability: 5°/hr
Initial zero value: 0.2°/s
Scale factor error: ±0.05%
Nonlinearity: ±0.1%
Axis alignment error: ±0.05°
Noise density: 0.0028°/s/√Hz
Bandwidth: 256Hz
Magnetometer Parameters
Range: ±4900uT
Bias stability: 20nT
Scale factor error: ±0.09%
Nonlinearity: ±0.3%
Axis alignment error: ±0.05°
Noise density: 0.14nT/√Hz
Bandwidth: 200Hz
ZL9NSQ Wireless Centrale Inertielle IMU Sensor Module x1
2.54-10Pin pin header x2

Related products


The ZL9NSQ is a high-performance 3D attitude sensor module that integrates a three-axis accelerometer, a three-axis gyroscope, and a three-axis magnetometer. Featuring a 32-bit ARM Cortex-M4F microprocessor, it utilizes the IMU Motion Engine algorithm along with a 2.4G wireless transceiver and packaged antenna. Advanced signal processing algorithms handle high-speed sampled sensor data to deliver accurate and reliable quaternions, Euler angles, calibrated accelerations, and calibrated angular velocities, providing precise three-dimensional attitude information.