

|

|

Depois da participação no Festival Nacional de Robótica 2014 (FNR2014), que se realizou em Espinho de 14 a 18 de Maio a equipa de Futebol Robótico Junior (FRJ) da botnroll.com prepara a sua participação no RoboCup 2014 no Brasil, em João Pessoa de 19 a 25 de Julho. Na foto acima temos a equipa da botnroll.com e as equipas do Factory e Busca e Salvamento Junior B da Universidade do Minho.
A equipa é composta pelos elementos junior Michael Oliveira, Tiago Ribeiro, Inês Ribeiro e Fernando Ribeiro, o mentor José Cruz e o pai Fernando Ribeiro! O Nuno Araújo, não pertencendo à equipa, foi sem dúvida uma grande ajuda e inspiração dos nossos juniores para o desenho 3D!

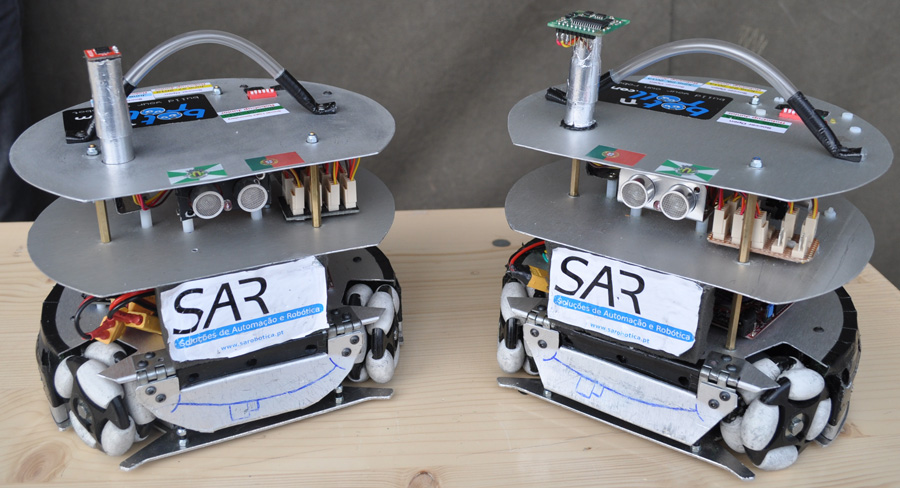
A nossa filosofia é a de mostrar o nosso trabalho e fazer com que mais pessoas adiram e participem neste mundo da robótica! Desvendamos o nosso robô e esperamos que possam aprender com ele, assim como nós!
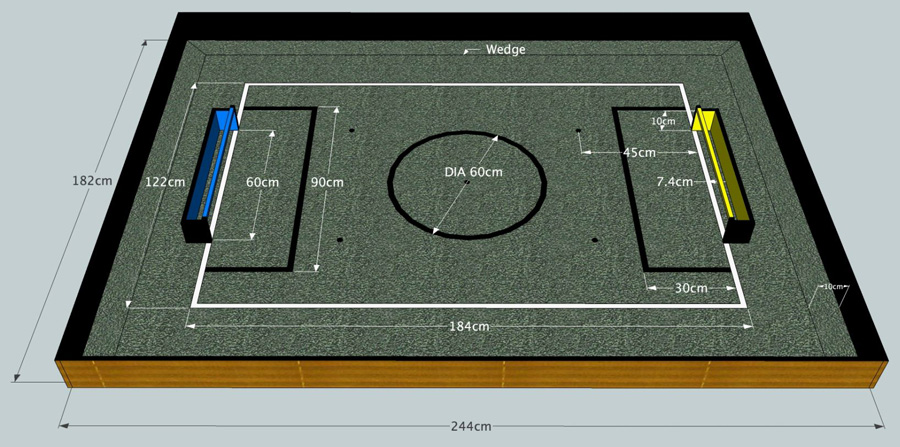
Participa na Open League B, isto é, dois robôs por equipa com dimensões máximas de 22cm de diâmetro e altura e peso máximo de 2400g, jogam num campo de 122x184cm entre linhas. O campo B tem 30cm depois das linhas e o robô não pode ir para essa área pois sofre penalizações. Podem consultar as regras deste ano neste documento .pdf!

Este ano decidiu-se redesenhar o robô melhorando os aspectos que achamos essenciais. Ao nível da estrutura mecânica optou-se por desenhar primeiro o robô em 3D e partir para a montagem depois de tudo bem definido no computador!
O nosso amigo Nuno Araújo da 3DM deu uma ajuda para a equipa quebrar o gêlo no desenho 3D sendo uma ajuda preciosa na formação dos nossos juniores que desenham agora em 3D também! Podem consultar alguns trabalhos do Nuno aqui!

O robô deste ano será em tudo semelhante ao do ano passado, o que fica sem alteração:
O que é novo este ano:
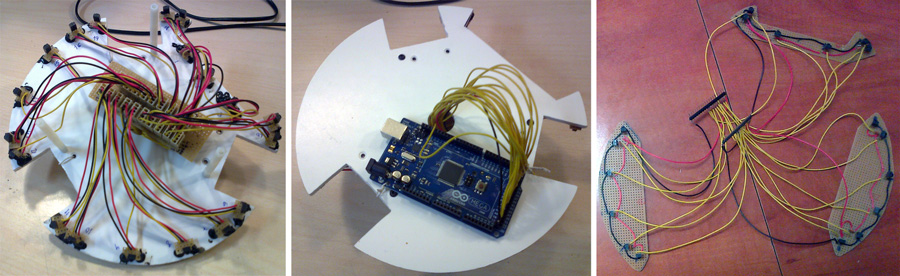
A novidade é que nos livramos dos fios! Depois de 3 anos a testar componentes que eram ligados com fios chegamos a uma configuração estável na electrónica e decidimos desenhar 3 PCB's para colocar todos os componentes minimizando as ligações com fios!
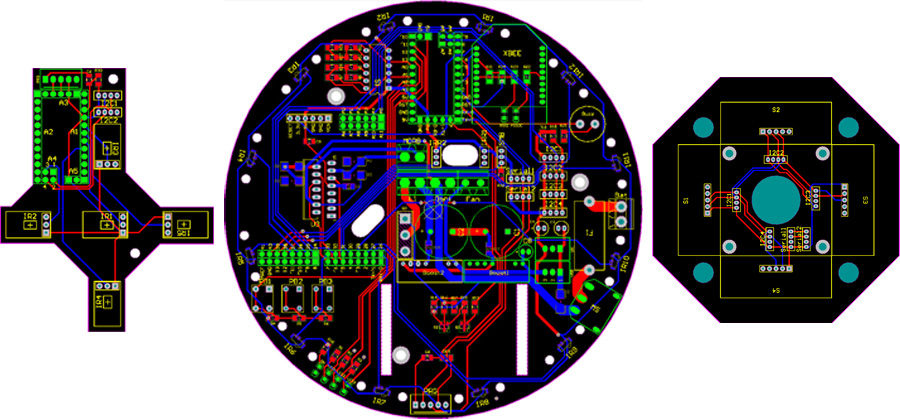
A placa do chão (à esquerda) tem 5 sensores QRE1113 e um arduino Mini dedicado para a leitura das linhas do campo. A placa principal (ao centro) alberga os dois arduinos ( Mini e ChipKit32 ) e é o cérebro do robô. A placa dos sonares (à direita) fica no topo do robô, onde se fixa também a bússola! Todas as placas comunicam usando barramento I2C. A placa dedicada à alimentação da bobina do chuto desapareceu e está agora integrada na placa principal.
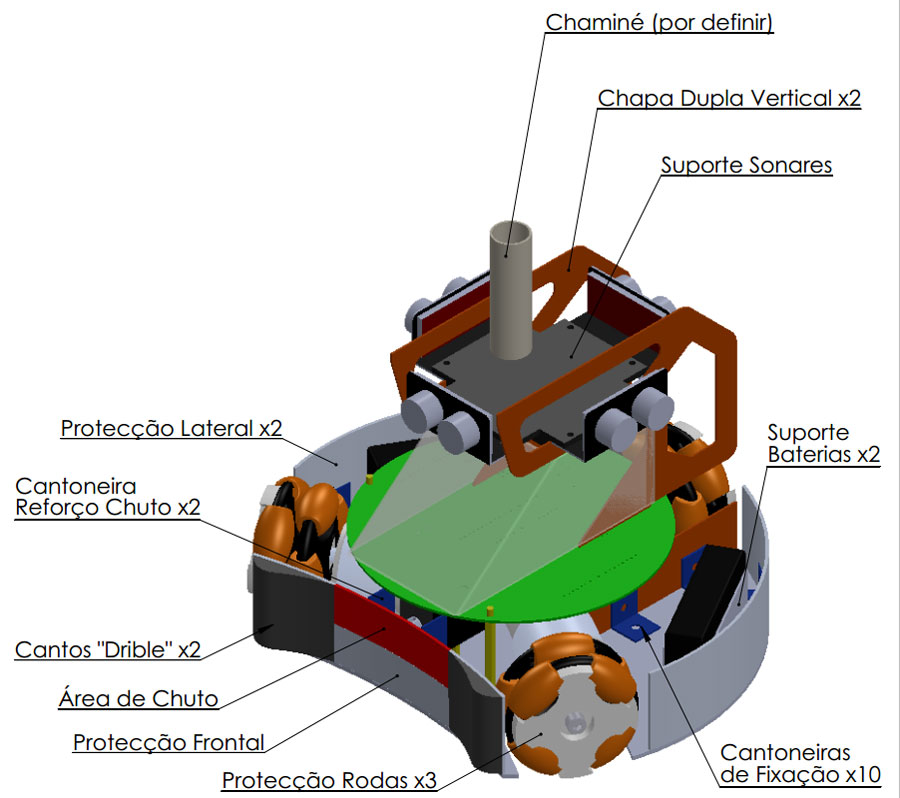
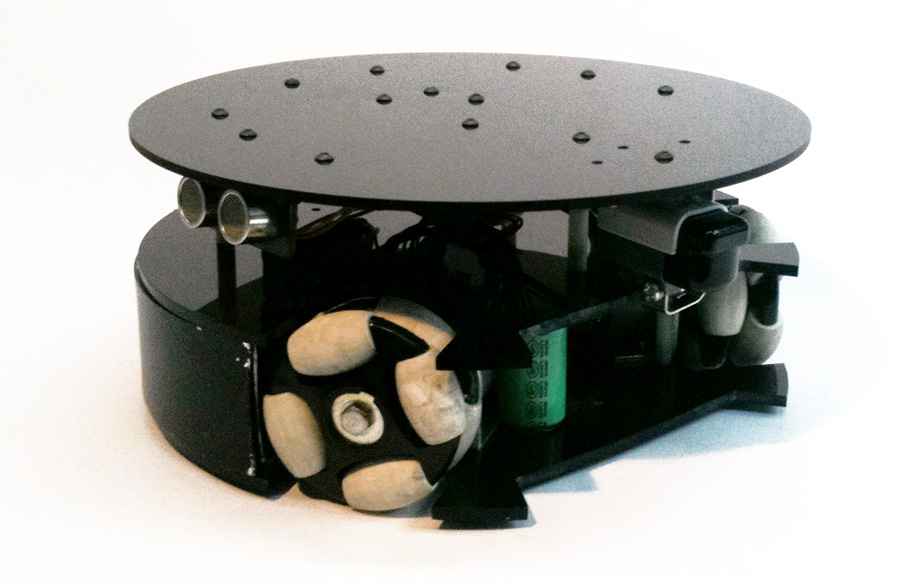
A estrutura foi toda redesenhada. O 3D foi sem dúvida uma ferramenta essencial que nos roubou bastante tempo no início mas que nos permitiu recuperá-lo no final! Depois de desenhados todos os componentes, ao milímetro, tudo pode ser colocado e recolocado sem que tenhamos que fazer um único furo ou apertar um parafuso! Até os PCB´s foram importados para o projeto e os suportes desenhados no 3D. Depois do 3D concluído tivemos que escolher o material para construir o robô e aqui surge uma novidade também.... porque não imprimir o robô? A botnroll ligou a impressora 3D e o robô nasceu... literalmente! Este ano o robô tem a estrutura toda em plástico PLA e como consequência o seu peso foi reduzido consideravelmente! Adeus estruturas de alumínio furadas e re-furadas com suportes e espaçadores que tinham que ser todos fixos com parafusos...e cola anaeróbica para não se desapertarem!
O sistema de chuto foi todo refeito pois no ano passado iamos sendo desclassificados por causa do chuto... A forma como estava desenhado fisicamente não fazia o robô estar de acordo com as regras. Não nos apercebemos disso, e o juri das competições também não viu nada de ilegal nas as pesagens e medições, no entanto, os olhares atentos de uma equipa observaram a ilegalidade e tivemos que alterar o chuto a meio do RoboCup, perdendo considerável rendimento no ato de chutar a bola. Este ano temos um chuto novinho em folha e de acordo com as regras! A electrónica do chuto também foi atualizada e este ano temos uma solução bem mais leve para o elevador de tensão!
Também foi alterada a forma como o robô deteta a bola na zona de chuto e este ano temos à nossa disposição um sistema mecânico redesenhado e um sistema óptico! No FNR2014 foi usado e testado somente o sistema mecânico.
Os sensores para detecção da bola foram substituidos por novos que estamos a testar este ano e são sensores SMD com ganho variável. O número de sensores foi reduzido de 15 para 12 e estão distribuidos uniformemente no robô com ângulos de 30º. Chegamos à conclusão de que um elevado número de sensores não é importante mas sim a sua eficácia.
Embora a filosofia do robô se tenha mantido, muita coisa mudou no hardware e o software sofreu muitas alterações para se adaptar ao hardware novo! Com um atraso significativo na produção dos PCB's, o tempo que tivemos para programação para o FNR2104 foi básicamente para integrar todo o hardware no software e testá-lo! Todo o código de estratégia de jogo foi efectuado durante a competição!
Independentemente de todos estes problemas tinhamos definido dois objectivos:
Estes objetivos foram ambos conseguidos e temos agora que trabalhar para representar o nosso país condignamente.
Problemas detectados nos testes e competição:
Factores positivos nesta versão:
A implementar ainda nesta versão:
Mais novidades em breve!
Novo ano, novas regras!
Com tantas alterações foi necessário remodelar o robô completamente corrigindo o que estava pior na versão anterior:
A questão do peso foi resolvida com uma base de alumínio de 3mm e três de 1mm em vez de duas de 4mm e uma de acrílico de 4mm.
Uma bobina de pequenas dimensões substituiu a anterior e foi adicionado um circuito elevador de tensão que recorria a um circuito oscilador e relés que multiplicavam a tensão da bateria por um fator de 6.
Novo sistema de chuto mais simples e com menos perdas mecânicas.
A ligação entre as bases de alumínio foi efectuada por espaçadores de latão que possuiam boas características de peso e de interferência ferro-magnética de forma a não interferirem com a bússola.
O número de sensores da bola foi reduzido para 15 tendo agora 24º para cada sensor. O sensores foram inseridos dentro de "casulos" com o intuito de diminuir o número de sensores que detectam a bola e somente os sensores que realmente têm a bola à sua frente, a detectarem.
A placa controladora de motores Bot'n Roll OMNI-3MD recebeu uma atualização de firmware bastante importante que melhorou o controlo e incluiu uma rampa de aceleração totalmente configurável, melhorando substancialmente o movimento dos robôs possibilitando arranques e travagens suaves com o mínimo escorregamento das rodas!
Foi testada a bússola HCM6352 num dos robôs para comparar o seu desempenho com a CMPS03.
Foi adicionado um sonar na frente do robô para melhorar a localização.
Foram adicionados 5 sensores analógicos QRE1113 para detectar as linhas do campo e foram ligados ao CHIPKIT UNO 32.
Módulos de comunicação ZigBee foram inseridos no robôs.
No software foram implementadas novas rotinas de localização e decidiu-se usar a fusão sensorial, ou seja, utilizar a informação dos sonares e dos motores numa primeira fase, para o FNR2013. Somente para o RoboCup se inseriu a informação dos sensores de linha.
Novas rotinas para o sensor da bola com diferentes filtros implementados e testados.
Com tantas alterações, objetivo deste ano era de testar todo o hardware e software no FNR2013. O apuramento para o RoboCup não era um objectivo.
Problemas detectados nos testes e competições:
Factores positivos nesta versão:
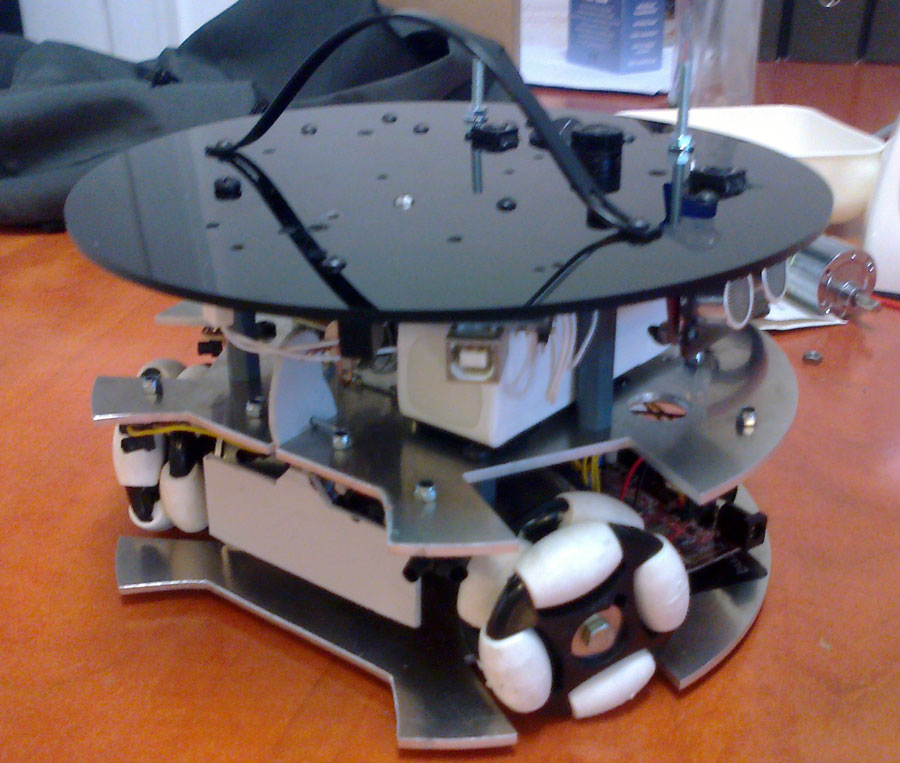
Em 2012 foi decidido que o robô deveria ver a bola em 360º. Definiu-se assim que teria 18 sensores dispostos em intervalos de 20º em todo o perímetro do robô. Os sensores escolhidos foram os SHARP GP1UX511QS que equipam o Bot'n Roll ONE com ganho fixo e uma boa imunidade à luz ambiente.
Inicialmente ligaram-se todos os sensores a um Arduino MEGA e a ideia era de analisar as transições de todos os sensores de acordo com a emissão de infravermelhos da bola oficial. Verificou-se no entanto que o Arduino MEGA com os seus 16MHz a 8 bits não tinha processamento suficiente para a análise necessária e foi necessário encontrar uma solução alternativa. Foi decidido testar o CHIPKIT UNO 32 que com os seus 80MHz a 32 bits se revelou bastante capaz e foi escolhido para integrar o robô.
O mecanismo de chuto foi também revisto pois o anterior não dispunha da potência necessária para o efeito. Neste ano as regras proibiram tensões superiores a 15V no robô, logo os sistemas de chuto com elevadores de tensão tiveram que ser abandonados pelas equipas. Assim foi testado um novo mecanismo com uma bobina com o enrolamento alterado para ser atuada com os 15V da bateria.

Um interruptor de pressão era o sensor de chuto que indicava ao Arduino UNO a presença da bola. Um MOSFET permitia o disparo da bobina e o sistema revelou-se bastante potente, sendo no entanto bastante volumoso e pesado.
Novos motores mais potentes e com mais rotação (350rpm) equiparam o robô e manteve-se o circuito de drive dos motores Bot'n Roll OMNI-3MD assim como as rodas omnidireccionais da botnroll.com que permitem um escorregamento mínimo.
Três sonares SRF08 equipavam o robô eram a chave para a localização do mesmo no campo. A orientação do robô era conseguida com o auxílio a uma bussola CMPS03.
Foi desenvolvido software para a detecção da bola para o CHIPKIT UNO 32 que se baseava na análise das transições dos sensores de infravermelhos e na largura dos pulsos que correspondem à distância da bola. Para o Arduino UNO foram melhoradas as rotinas para a orientação do robô usando a bússola, a localização do robô em campo usando os 3 sonares. Desenvolveu-se nova estratégia de jogo para o guarda redes e avançado.
Neste ano o peso do robô ficou mesmo no limite dos 2500g impostos nos regulamentos e foi necessário perfurar as bases de alumínio para diminuir o peso dos robôs.
O objectivo deste ano era de de testar todos os componentes do robô e verificar como se comportava durante a competição.
Problemas detectados em testes e na competição:
Na nossa primeira participação no FRJ, em parceria com a EPB ficou combinado que fariamos o guarda redes. Assim partiu-se de um Bot'n Roll OMNI equipado com 3 motores com encoder, uma placa controladora de 3 motores Bot'n Roll OMNI-3MD, um Arduino UNO e uma bateria Li-Po de 14,8V. Adicionou-se uma bobina para o chuto e para detecção da bola foi usado um sensor Lego IR Sensor que detecta a bola em 270º separados por 9 zonas. Uma bússola CMPS03 foi usada para a orientação e 3 sonares localizavam o robô em campo.
Para o Arduino UNO foram desenvolvidas rotinas para a orientação do robô usando a bússola, a localização do robô em campo usando os 3 sonares e a estratégia de jogo para o guarda redes.
Este projeto iniciou-se em 2011 quando a equipa 'SARTM' (atual 'Botnroll Soccer Team - Scorpions') foi fundada pelo aluno Tiago Ribeiro, o mentor Nino Pereira e o pai Fernando Ribeiro. Decidiu entrar na competição de Futebol Robótico Júnior e como a experiência era ainda pouca houve uma parceria com a Escola Profissional de Braga EPB, para uma equipa conjunta: SARTM fez o guarda-redes e a EPB fez o avançado. Na primeira competição, Festival Nacional de Robótica 2011 - Lisboa, com ainda que com muitas dificuldades, foi conseguido o 3º lugar numa competição de 4 equipas. Acima de tudo foi ganho aquele bichinho enorme por toda esta envolvente (eletrónica, software, mecânica).
Bichinho esse que nos fez participar no ano seguinte (Festival Nacional de Robótica 2012 - Guimarães) mas agora com uma equipa renovada, com os alunos: Tiago Ribeiro, Michael Oliveira, Inês Ribeiro, e com os mentores: Nino Pereira, José Cruz e o pai Fernando Ribeiro. Foi o primeiro evento em que participamos como equipa, o evento correu da melhor forma ao nível de aprendizagem bem como ao nível de resultados (3º num total de 4 equipas). Uniu-nos muito como equipa, e embora não tenhamos conseguido o apuramento para os mundiais (RoboCup) a alegria era tanta que isso era o menos.
Fomos então convidados pelos nossos companheiros da EPB para irmos na aventura de um RoboCup com eles, aceitamos com todo o orgulho e honra esse convite de os ajudar nessa missão que era um festival internacional, trouxemos tantas ideias, tópicos, jogos gravados, estratégias, fotografias, conversas, cartazes, contactos e muito mais que as coisas nem nos cabiam na cabeça, mas acima de tudo trouxemos experiência.
Experiência essa que nos permitiu com a mesma equipa, ter um 'boom' no nosso robô, a quantidade de experiência foi de tal maneira grande que no Festival Nacional de Robótica 2013 - Lisboa voltamos a competir agora num total de 6 equipas, o campeonato foi muito mais renhido e as equipas do topo não se afastaram tanto como nos anos anteriores das equipas de baixo, e com uma excelente prestação conseguimos aquilo para o qual lutamos aquele ano o apuramento ao mundial (com um 3º lugar onde os dois primeiros lugares foram ocupados pela escola Cenatex).

Na nossa primeira competição internacional, tudo era novo, e as expectativas não eram propriamente altas apenas lá íamos para representar o nosso pais da melhor maneira sem esperar nada, criamos amizades com outras equipas, adquirimos pela primeira vez o espirito RoboCup como participantes, e foi apaixonante, o espirito lá vivido foi qualquer coisa para lembrar no resto das nossas vidas, e mais uma vez a experiência que ganhamos foi igualmente avassalador e os resultados foram muito melhores do que o esperado, conseguimos trazer um titulo mundial (1º em Superteam no RoboCup2013) mas de certa maneira ainda mais valioso para nós foi um 6º lugar em individual também no RoboCup2013.

Após todas estas competições, aqui nos deparamos com um novo ano, um novo Festival Nacional de Robótica e a adição de um novo membro na equipa: António Ribeiro e ainda muito trabalho, muita preparação, muitas reuniões, muitas noites sem dormir, muitas coisas abdicadas, mas a paixão é uma, este prazer pela Robótica, pela Eletrónica, pelo Software, pela Mecânica, pela Competição, pelas vivências.
A equipa 'Botnroll Soccer Team - Scorpions' tem este ano um novo robô e participará no Festival Nacional de Robótica 2014 em Espinho.